


Triangülasyon ve yapılandırılmış ışık

Gray-Code deseninde, açık veya koyu aydınlatılan ve giderek daha ince hale gelen bir çizgi sekansıdır. Bir kamera ile yoğunluk seyrinin izlenmesi sayesinde bir desen algılanabilir ve böylece bir derinlik aralığı belirlenebilir. Diğer yandan faz görüntüleri, bir objeye yansıtılan sinüs dalgaları şeklindeki dalga desenleridir. Örneğin desenin oluşturulması için bir mikro ayna elemanı (Digital Micromirror Device) kullanılabilir. Dalganın fazı görüntüden görüntüye kaydırılır. Faz akışı aracılığıyla bir kamera yardımıyla derinlik bilgisi elde edilebilir.

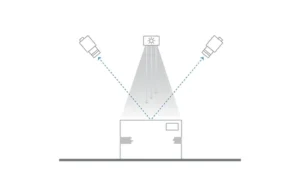
Pasif stereo
Bu işlemde iki kamera aynı objeyi bir açının altında inceler. Çeşitli inceleme açıları sayesinde bir noktanın mesafesi belirlenebilir. Burada zor olan, aynı noktanın her iki kamera ile tanımlanmasıdır. Örneğin, beyaz bir duvar gibi düşük kontrastlı bir yüzey incelendiğinde, bu yöntem yetersizdir.
Aktif stereo
Yapı pasif stereonun yapısıyla aynıdır. Tek fark, burada bir desenin (ör. rastgele dağıtılmış noktalar) objeye yansıtılmasıdır. Bu, her iki kameraya bir noktanın atanmasını kolaylaştırır.

Time of Flight
Bu yöntemde, obje ile sensör arasındaki mesafe ışık hareket süresi yardımıyla belirlenir. Burada sensör, bir objeye çarpan ışık darbeleri gönderir. Cisim bu ışık darbelerini yansıtır. Işık darbelerinin yansıma süresine bağlı olarak mesafe belirlenir. Bu şekilde cisimlerin mesafeleri veya yapıları gibi derinlik bilgileri belirlenebilir.
3D teknolojilerin karşılaştırılması
| Yapılandırılmış ışık | Pasif stereo | Aktif stereo | Time of Flight | |
|---|---|---|---|---|
| Çözünürlük | ||||
| Hassasiyet | ||||
| Ortam ışığı | ||||
| Ölçüm hızı | ||||
| Düşük kontrastlı objeler | ||||
| Obstüksiyon/gölgeleme |

Aydınlatma: İdeal aydınlatma için Light Engines
Aydınlatma kaynağı bir lazer veya LED olabilir. Lazerler, yüksek zamansal ve mekansal bağlam ile ışık üretir. Spektrum dar bantlıdır. Bir lazer tarafından üretilen ışık, optik aracılığıyla belirli bir şekle getirilebilir. Başka bir aydınlatma türü de LED’in kullanılmasıdır. Bu, bir lazere kıyasla geniş bantlı bir ışık üretir ve neredeyse hiç bağlama sahip değildir. LED’ler kullanım kolaylığı sağlar ve lazer diyotlara kıyasla daha fazla dalga boyu oluşturur. Dijital Light Processing (DLP) tekniği ile her türlü desen oluşturulabilir. LED ve DLP kombinasyonu, yapılandırılmış ışığın 3D tekniği için ideal olan çeşitli desenlerin hızlı ve etkili bir şekilde üretilmesini sağlar.

Görüntü kaydı: CMOS gücü ile mükemmel görüntü
Obje, yüksek çözünürlüklü bir kamera kullanılarak iki boyutlu kaydedilir. Günümüzde kameralar tipik olarak CMOS veya CCD teknolojisine dayanan ışığa duyarlı bir yarı iletken çipe sahiptir, bu sırada CMOS teknolojisi daha sık kullanılır. Bir çip birçok tek hücreden (piksel) oluşur. Modern çipler milyonlarca piksele sahiptir, böylece objenin iki boyutlu olarak algılanması mümkün olur. CMOS teknolojisinin daha iyi performansa sahip olması nedeniyle 3D sensörlerde kullanılır.
Yanlış renk gösterimi

Nokta bulutunun renklendirilmesiyle objenin derinliği görülebilir. Yoğunluk, farklı renk tonlarının yardımıyla gösterilir. Bu yanlış renk gösterimi sayesinde, objenin hangi parçalarının ön veya arka planda bulunduğu doğrudan tespit edilebilir.
Yüzey bilgisi

ShapeDrive G4 sensörleri sadece 3D nokta bulutu biçiminde bir objenin mekansal bilgisini vermekle kalmaz, aynı zamanda tek bir noktanın parlaklık yoğunluğu ile ilgili bilgi verir. Bu değer, görüntü işleme sırasında ilave bir kod olarak kullanılabilir ve böylece daha iyi sonuçlar sağlanır.

Entegrasyon: Sensörden uygulamaya
3D nokta bulutu kaydedilen görüntülerden hesaplanır. Bu işlem, hem sensörde hem de bir endüstriyel bilgisayarda yapılabilir. Kolay entegrasyon için üreticinin Yazılım Geliştirme Kitleri (SDK) veya GigE Vision gibi standart arayüzler kullanılır.

Monokrom aydınlatma kullanılması
Monokrom aydınlatma kullanılması, optik filtrelerle ortam ışığından gelen parazitlerin etkin bir şekilde bastırılmasını sağlar. Aydınlatma, maksimum verimlilik ve aydınlatma gücü bakımından da optimize edilebilir.
Bu Ürünlerle İlgileniyorsanız
Teknik detaylar, fiyatlandırma ve özel çözümler için ekibimize ulaşın.
Teklif Al
